Autor de esta pregunta: Anthony Rossiter, School of Electrical and Electronic Engineering, University of Sheffield, Inglaterra
Durante muchos años, Santa ha confiado en una estrategia suave para guiar a sus renos: proporcionarles instrucciones cuidadosas y graduales para que reduzcan la velocidad a medida que se acercan a cada tejado. Esto garantiza aterrizajes suaves y elegantes, evitando paradas bruscas que podrían perturbar la magia navideña. Este método, conocido como una “ley de retroalimentación”, indica a sus renos cuánta fuerza usar como K veces la distancia que queda por recorrer.
Con la configuración actual (representada por la curva azul en la figura), los renos de Santa desaceleran gradualmente, llegando suavemente a velocidad cero justo encima de cada casa. Este método garantiza aterrizajes seguros y elegantes, pero lleva más tiempo del deseado. Aunque los renos siguen esta estrategia a la perfección, la desaceleración lenta hace que Santa apenas logre completar su ruta a tiempo, poniendo en riesgo la entrega puntual de regalos. Así que Santa tiene una nueva idea: piensa que, al dar instrucciones más grandes (aumentando el parámetro K). Con este ajuste, espera que los renos aceleren su acercamiento a cada tejado, permitiendo paradas más rápidas y ahorrando valioso tiempo. Dado que los renos son mágicos y nunca se cansan, Santa está convencido de que esta estrategia será perfecta: ¡cuanto más grande sea K, más rápida será la entrega!
Pero aquí está la pregunta: ¿debería Santa aumentar sus comandos (subiendo K a un número más grande) o debería no cambiar K en absoluto para llegar más rápido a los tejados?
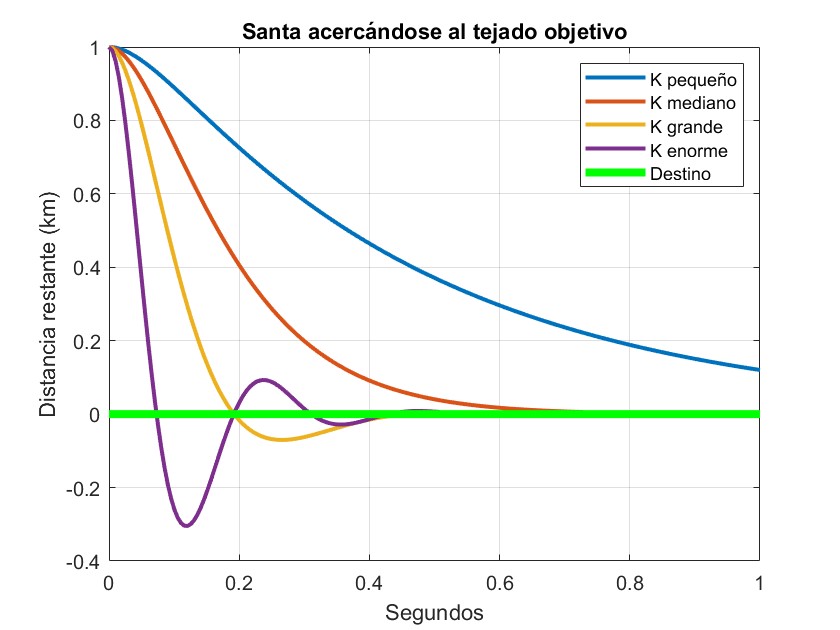
a. 🚀💨💜 K debería ajustarse al máximo, alcanzando valores tan altos como el que representa la curva morada en la figura. Con este cambio, los renos se moverían como si estuvieran en modo turbo, logrando paradas instantáneas en cada tejado. ¿Y qué importa si el sombrero de Santa sale volando? Mientras los renos puedan manejar fuerzas ilimitadas, esta parece ser la mejor estrategia para cumplir con la monumental tarea de entregar todos los regalos a tiempo.
b. 🎯🌀💛 El valor de K debería ajustarse a un nivel alto pero adecuado, como se observa en la curva amarilla de la figura. Sin embargo, aumentar K aún más no ayudará al trineo a llegar más rápido al destino, pero causará oscilaciones alrededor del tejado objetivo que marearán a Santa y a los renos.
c. ⚡🔧❤️ Incrementa K en comparación con la configuración actual, pero no demasiado. El valor medio (curva roja) muestra a los renos haciendo su mejor trabajo, equilibrando velocidad y control. ¿Qué podría salir mal? No es como si el trineo empezara a hacer trucos, ¿verdad?
d. 🐢📚💙 Mantén la configuración actual. Claro, es un poco lenta, pero es fiable. Además, prefiero jugar sobre seguro hasta que tome ese curso de diseño de retroalimentación PID y diseñe para Santa una estrategia de conducción de renos de primera categoría para la próxima Navidad.
e. 🤖✨🎅 Esta pregunta va más allá de la teoría de control: ¡es un trabajo para la inteligencia artificial! Enseñemos a los renos de Santa a aprender sobre la marcha. ¡Próxima parada, renos-robot y paseos en trineo con IA!
