Author of this question: Anthony Rossiter, School of Electrical and Electronic Engineering, University of Sheffield, England
Santa has used for many years a gentle strategy to guide his reindeer — giving them careful, gradual instructions to slow down as they approach each rooftop, arriving smoothly to avoid any sudden stops. This method, known as a “feedback law”, tells his reindeer how much force to use as K times the distance left to travel.
With the current setup (blue curve in the figure below), Santa’s reindeer slow down gradually, arriving gently at zero speed right above the house, which is smooth and safe but takes a little too long. The reindeer follow this method well, but the slow deceleration means Santa is barely finishing his route on time. So, Santa has a new idea: he thinks that by giving larger instructions (increasing the parameter K), the reindeer can speed up their approach, making faster stops and saving time. Since reindeer are magical and never seem to tire, Santa believes this approach should work perfectly — the bigger K, the faster the delivery!
But here’s the question: should Santa increase his commands (raising K to a larger number), or should he actually not change K at all to reach the rooftops faster?
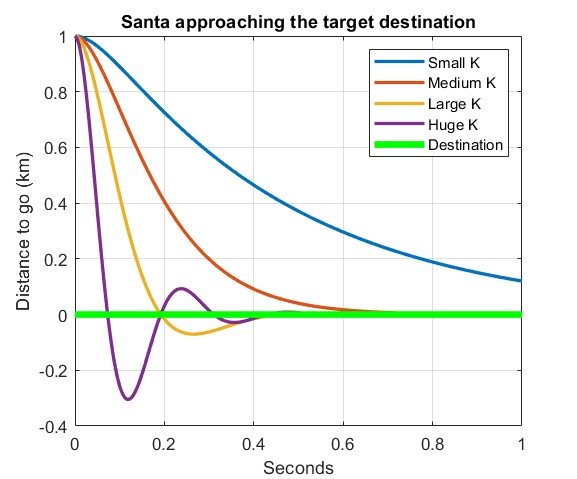
a. 🚀💨💜 K should be set as high as possible, like the huge value that leads to the purple curve in the figure. This will make the reindeer zoom in like they’re on turbo mode. And who cares if Santa’s hat flies off? As long as the reindeer can handle unlimited force, it’s the best way to handle the massive number of gifts to deliver.
b. 🎯🌀💛 The value of K should be set to a large, appropriate level, as suggested in the yellow response. However, increasing K even further won’t help the sleigh reach the destination any faster, but it will lead to oscillations around the target rooftop that will make Santa and the reindeers quite dizzy.
c. ⚡🔧❤️ Increase K compared to the current setup, but not too much. The medium value (red curve) shows the reindeer doing their best work, balancing speed and control. What could go wrong? It’s not like the sleigh will suddenly do tricks, right?
d. 🐢📚💙 Stick with the current setup. Sure, it’s a bit slow, but it’s reliable. Plus, I’d rather play it safe until I take that PID feedback design course and design for Santa an A+ reindeer-driving strategy next Christmas.
e. 🤖✨🎅 This question is beyond control theory — it’s a job for artificial intelligence! Let’s teach Santa’s reindeer to learn on the fly. Next stop, Robo-Reindeer and AI sleigh rides!
